Robot suiveur de ligne
SAE de première année de BUT GEII – Électronique analogique et embarquée
Compétence ConcevoirPrésentation du projet
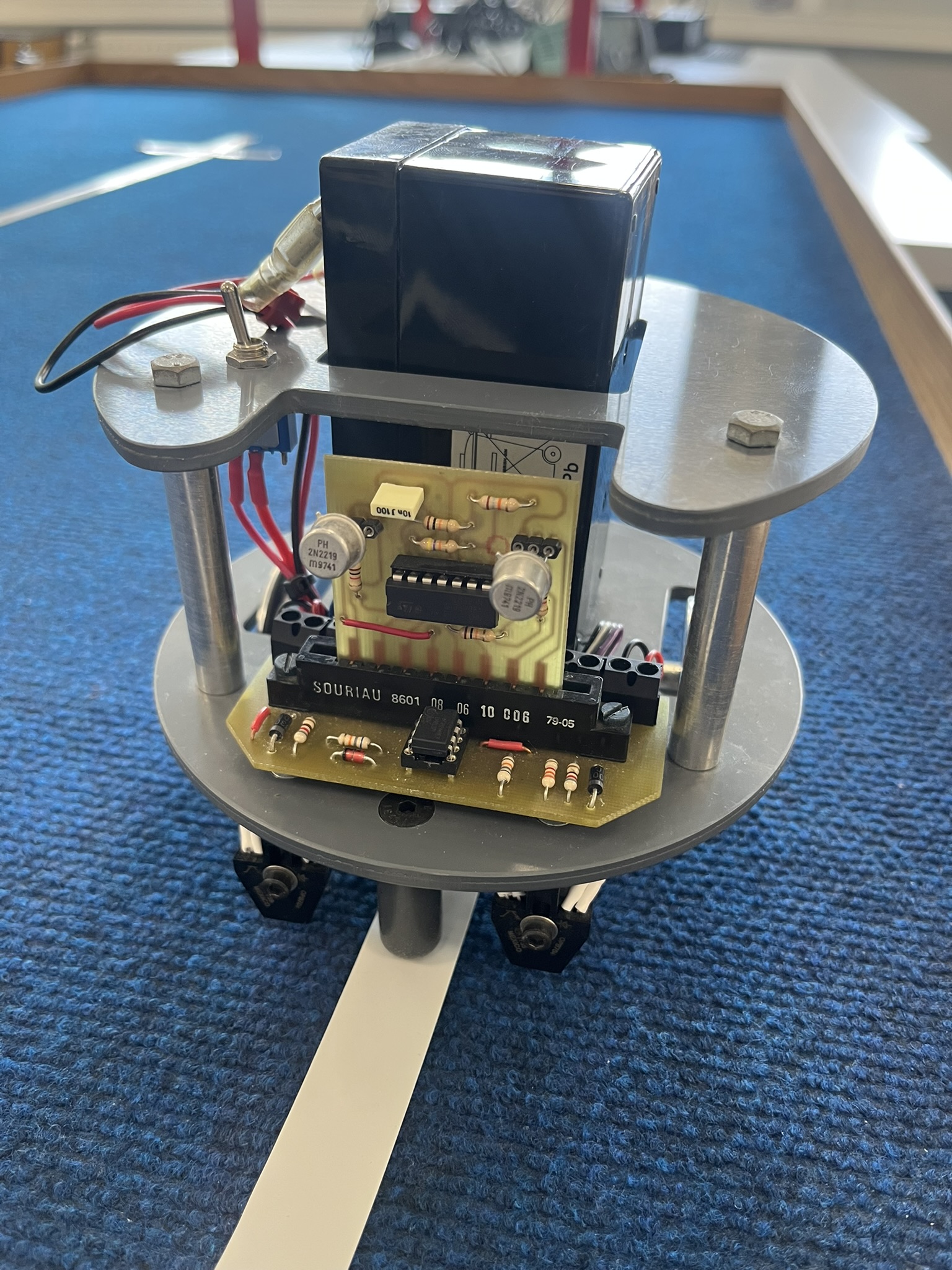
Dans le cadre d’une SAE de première année de BUT GEII, nous avons réalisé en groupe un robot suiveur de ligne capable de se déplacer automatiquement en suivant un tracé au sol grâce à des capteurs optiques. L’objectif du projet était de comparer deux approches de contrôle : une solution analogique et une solution numérique.
Nous avons ainsi conçu deux cartes électroniques distinctes. La première permettait de contrôler le robot de manière entièrement analogique, sans microcontrôleur, en utilisant uniquement des amplificateurs opérationnels (AOP) et des portes logiques. La seconde carte était une version numérique pilotée par une carte Nucleo STM32F303K8, offrant un contrôle plus précis et plus fluide du robot.
Fonctionnalités
- Détection de la ligne grâce à des capteurs optiques
- Contrôle analogique par AOP et logique combinatoire
- Contrôle numérique via microcontrôleur STM32
- Adaptation automatique de la vitesse et de la direction
- Suivi fluide et précis en version numérique
Technologies utilisées
Pour la partie analogique, nous avons mis en œuvre des comparateurs, des amplificateurs opérationnels et des portes logiques afin de traiter directement les signaux des capteurs et commander les moteurs du robot.
Pour la version numérique, le système reposait sur une carte Nucleo STM32F303K8 programmée sous STM32CubeIDE avec les bibliothèques HAL. Les valeurs des capteurs étaient acquises via l’ADC du microcontrôleur, puis traitées par un algorithme de suivi de ligne permettant d’ajuster la vitesse des moteurs de manière progressive.
- Amplificateurs opérationnels et logique câblée
- Microcontrôleur STM32F303K8
- STM32CubeIDE et bibliothèques HAL
- Capteurs optiques infrarouges
- Commande de moteurs DC
Difficultés rencontrées
La conception de la carte analogique a nécessité un important travail de réglage des seuils et des gains des amplificateurs opérationnels. Bien que le système fonctionnait correctement, le comportement du robot était brusque et peu précis, avec des changements de direction rapides et parfois instables.
La version numérique a demandé une première mise en œuvre complète de la programmation embarquée sur STM32 pour ce type d’application. La configuration de l’ADC, la gestion des moteurs et l’élaboration d’un algorithme de suivi progressif ont représenté un véritable défi. Toutefois, cette approche a permis d’obtenir un suivi de ligne beaucoup plus fluide et fiable.
Galerie